
我院两篇论文被机器人领域顶会ICRA 2025接收
我院两篇论文《Occlusion-aware 6D Pose Estimation with Depth-guided Graph Encoding and Cross-semantic Fusion for Robotic Grasping》、《Smaller and Faster Robotic Grasp Detection Model via Knowledge Distillation and Unequal Feature Encoding》被机器人领域国际顶会ICRA 2025接收。
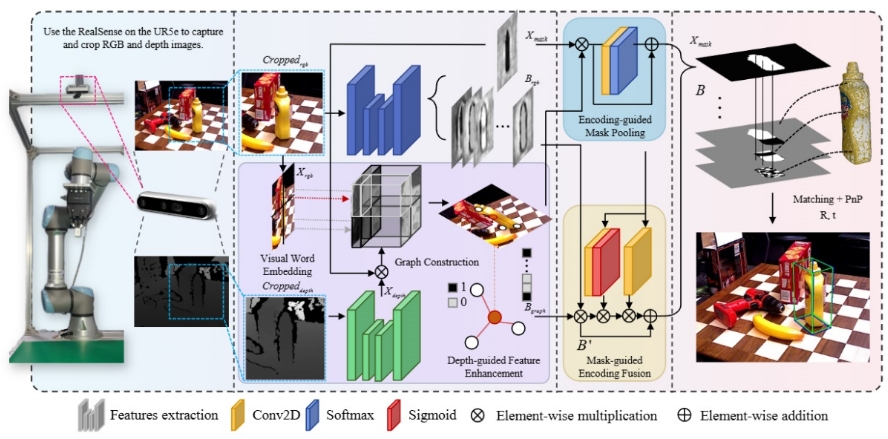
论文名称:《Occlusion-aware 6D Pose Estimation with Depth-guided Graph Encoding and Cross-semantic Fusion for Robotic Grasping》
论文作者:刘京阳,鹿振宇,陈路(通讯作者),杨静,杨辰光
论文介绍:精确的6D位姿估计对机器人抓取任务至关重要,然而在遮挡环境下常常面临参数预测不准确及复杂表面点关系建模不足的问题。为此,本文提出了一种新颖的遮挡感知6D位姿估计框架,通过引入基于深度引导的图神经网络(GNN),从RGBD输入中构建物体表面点之间的潜在关系。同时,利用物体掩码和二值编码两种语义信息的自适应融合,提取出高效的2D-3D对应特征,从而增强了位姿估计在遮挡场景下的鲁棒性。大量实验结果显示,该方法在LMO和YCBV数据集上相较于传统方法分别提升了1.2%和1.9%(部分物体提升高达30%),并在真实场景测试中取得了令人满意的效果。
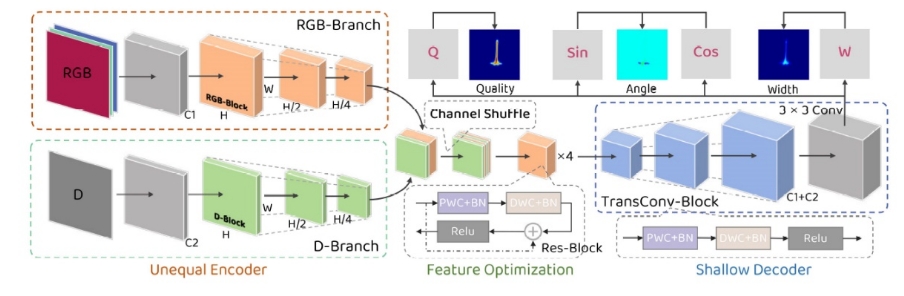
论文名称:《Smaller and Faster Robotic Grasp Detection Model via Knowledge Distillation and Unequal Feature Encoding》(Presentation of RA-L Paper)
论文作者:聂鸿,赵洲,陈路(通讯作者),鹿振宇,李卓茂,杨静
论文介绍:在机器人抓取任务中,为了实现更高的精度,传统抓取检测网络往往采用复杂的模型结构和海量参数,致使模型体积庞大且难以在嵌入式设备上高效运行。本文从两个方面入手:一是精心设计轻量级网络骨干,以充分挖掘RGB与深度图像中不均衡的抓取信息;二是在此基础上通过知识蒸馏技术,使得轻量网络能够自适应、高效地学习大型教师模型中的抓取特征。实验结果表明,该方法在Cornell、Jacquard、GraspNet和MultiObj等多个数据集上分别取得了98.9%、93.1%、82.3%和90.0%的优异表现,同时将模型参数从MB级降低至KB级。真实场景下嵌入式AI计算平台的抓取实验进一步验证了该方法的实用性和高效性。
ICRA(International Conference on Robotics and Automation)是国际顶级机器人学术会议之一,是机器人领域的主要国际学术组织IEEE机器人与自动化学会(IEEE Robotics and Automation Society, IEEE RAS)的年会。
撰稿人:陈路;二审:贾 佳;三审:钱宇华