
我院陈路研究组发表在机器人国际学术会议ICRA2025的论文荣获最佳论文提名
近期,山西大学大数据科学与产业研究院陈路研究组在遮挡场景位姿估计研究方面取得重要进展,相关成果“Occlusion-aware 6D Pose Estimation with Depth-guided Graph Encoding and Cross-semantic Fusion for Robotic Grasping”入围2025年机器人领域国际顶级会议International Conference on Robotics and Automation (ICRA)最佳论文提名(Best Conference Paper Finalist)。该论文第一作者为我校2023级硕士生刘京阳,通讯作者为大数据科学与产业研究院陈路副教授,合作者为华南理工大学鹿振宇教授、山西大学自动化与软件学院杨静讲师和英国利物浦大学杨辰光教授
图1 2025 ICRA Best Conference Paper Finalist证书
目标6D位姿估计旨在从视觉图像中预测物体在三维空间的位置和姿态,是实现机器人高精度抓取、交互与感知的重要基础能力,在智能制造、服务机器人、人机协作等领域扮演着重要角色。然而,目前主流位姿估计方法通常直接使用端到端神经网络预测目标姿态,在遮挡条件下,目标局部可见区域高度受限,传统特征匹配和全局几何建模能力受到约束,导致位姿回归结果不稳定,仍面临准确性和鲁棒性不足的挑战。
为了应对上述挑战,研究组引入二进制编码机制,通过学习上述编码在2D图像上的空间分布,实现可见区域与物体全局关键点之间的高效匹配;进一步,将二进制编码与深度图引导的图神经网络相结合,构建一个全新的遮挡感知6D位姿估计框架。在该框架下,不仅能够捕捉局部可见区域的高阶几何关系,还能通过语义掩码与二进制编码的交叉融合,显著提升特征表达的判别力。
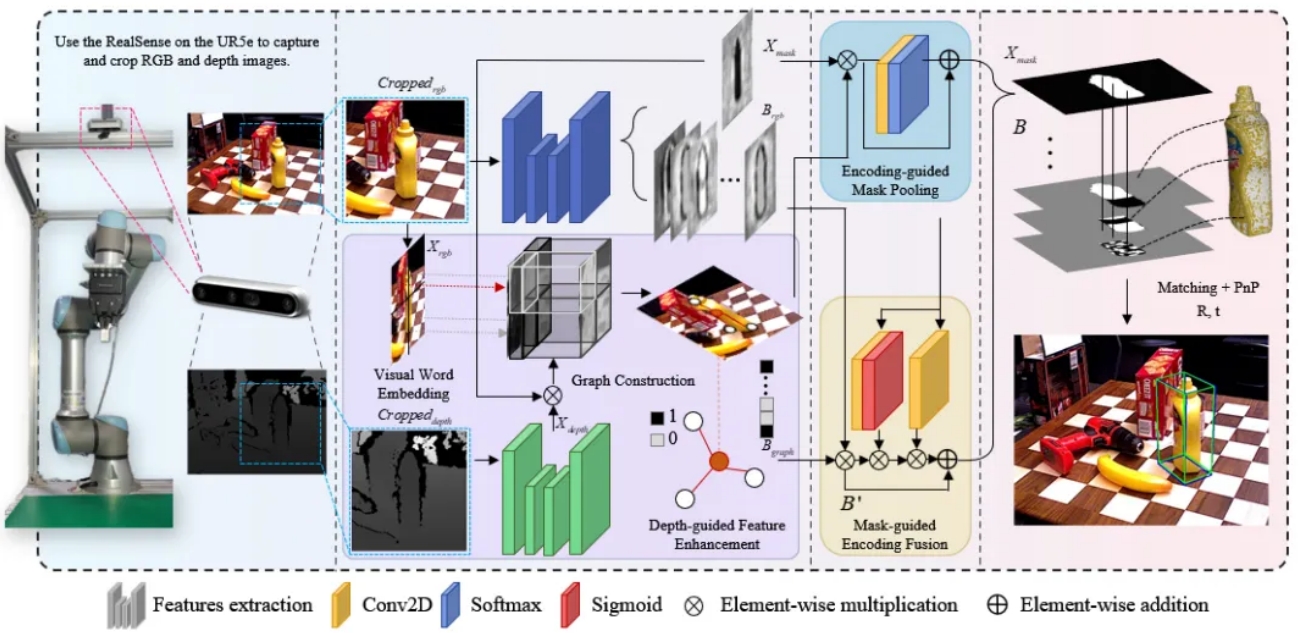
图2 研究团队提出的遮挡感知6D位姿估计新框架
在多个公开数据集、真实场景和虚拟场景中开展广泛对比实验,结果表明新方法能够显著提升对称/非对称、多尺度和纹理物体的位姿估计精度,且对多样化工况具有良好适应能力。
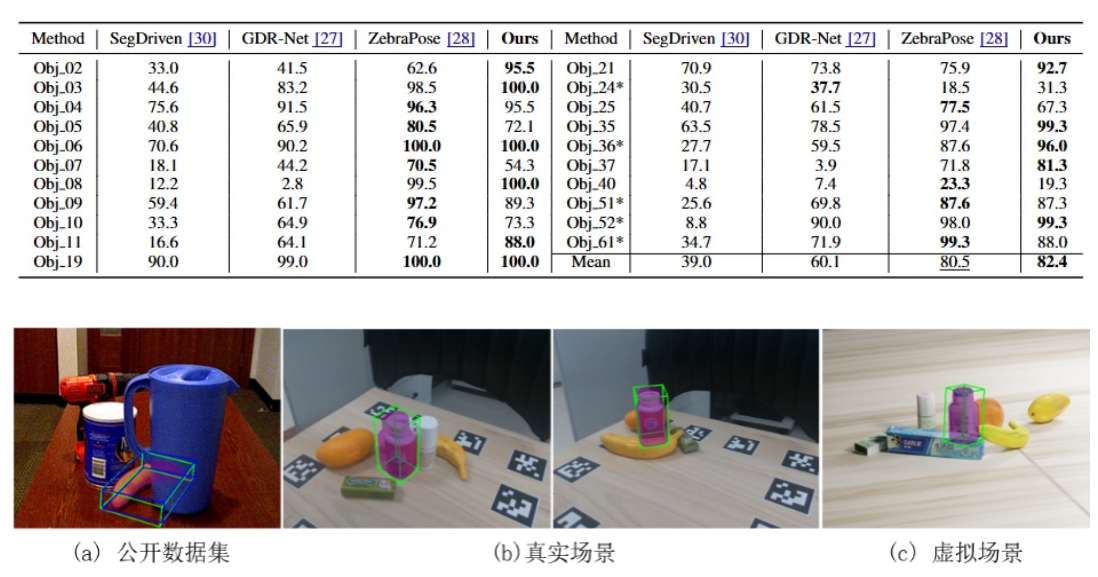
图3 新方法在公开数据集,真实、虚拟场景下的对比结果
该研究工作得到国家自然科学基金项目(62373233,62406181)、山西省基础研究计划青年项目(202203021222010)、山西省中央引导地方科技发展资金项目(YDZJSX20231B001)、以及山西省科技创新领军人才团队等支持。ICRA是机器人领域规模最大、影响最广泛的全球性国际学术会议,由IEEE机器人与自动化学会(IEEE Robotics and Automation Society, RAS)主办,每年举办一次,汇集了全球顶尖的机器人研究者、工程师和产业界人士。ICRA2025共收到4250篇投稿,接收率约为37.7%,其中共有16篇论文荣获最佳论文提名,入选率约为0.37%。